
Robotik
Das alles finden Sie in diesem Register und jede Woche ein wenig mehr;-)
- Zusammenbau eines Roboters
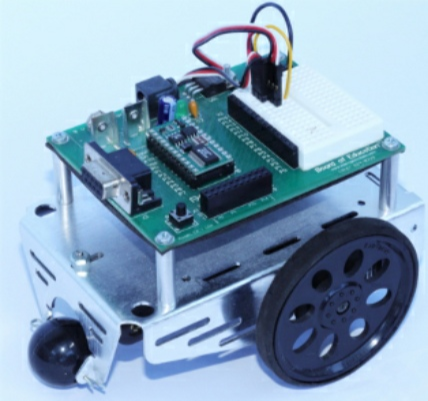 BoE-Bot (Fa. Parallax Inc.)
BoE-Bot (Fa. Parallax Inc.)
- Der BoE Bot
- Freilaufservo zentrieren
- Mit Pulsweite Geschwindigkeit und Richtung steuern
- Zwei Servos gleichzeitig ansteuern
- Mit FOR...NEXT die Laufzeit eines Servos steuern
- Geschwindigkeit-Pulsweiten-Diagramm eines Servos
- Den BoE-Bot navigieren
- Vorwärts bewegen
- Rückwärts bewegen, Drehung, Drehen am Platz
- Grundbewegungen mit Software nachjustieren
- Iteration
- Drehbewegungen justieren
- Entfernungen bestimmen
 BoE Shield (Fa. Parallax Inc.) mit einem Arduino UNO
BoE Shield (Fa. Parallax Inc.) mit einem Arduino UNO
- Der BoE-Shield Bot mit Arduino
- LEDs ein- und ausschalten
- Zeitdiagramm
- Funktionen aus der Bibliothek Servo
- Servos kalibrieren
- Pulsweite steuert Geschwindigkeit und Richtung
- Kombinationen von Pulsweiten beim Servoantrieb
- Rotationsgeschwindigkeiten eines Servos bestimmen
- Den BoE-Shield Bot Arduino navigieren
- Vorwärts fahren
- Rückwärts fahren und Drehungen
- Drehungen nach rechts und links
- Geradeausfahrt und Drehungen justieren
- Entfernungen bestimmen
- Geschwindigkeit und Laufzeiten berechnen
- Ramping Manöver
- Funktionen und Navigation
- Funktionsaufruf ohne Parameter
- Funktionsaufruf mit Parameter
- Fahrmanöver mit Funktionsaufrufen
- Eine verbesserte Bewegungsfunktion
- Taktile Navigation mit Fühlern (Whiskers)
- Whiskers Testprogramm
- Navigation mit Fühlern verbessern
- Künstliche Intelligenz und die Eckenfalle
- Navigation mit Fototransistor
- Licht - Spannung - Sensor
- Lichtsucher
- Wie arbeitet ein Fototransistor-Schaltkreis?
- Lichtstärke messen
- Fotosensitive Augen
- Ladungstransport im Fototransistor-Schaltkreis
- Entladung eines Kondensators
- Lichtmessungen im Gelände
- Der Weg zum Licht
- Fahrtest mit Terminal
- Der Shield-Bot Arduino sucht das Licht
- Navigation mit IR-Scheinwerfern
- Infrarote Lichtsignale
- IR Schaltungen zur Objekterkennung
- Programmbeispiel zur Objekterkennung
- Test des linken IR Detektors
- Feldtest
- Störenden IR-Lichtquellen auf der Spur
- Programmbeispiel für einen IR Schnüffler
- Den Erfassungsbereich von IR-Detektoren verändern
- Den IR Erfassungsbereich ausmessen
- Objekterkennung und Kollisionsvermeidung
- IR Hochleistungsnavigation
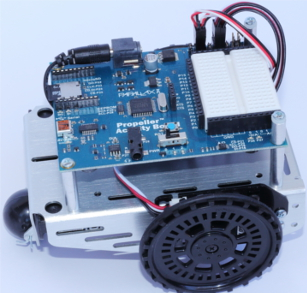 Propeller ActivityBot (Fa. Parallax Inc.)
Propeller ActivityBot (Fa. Parallax Inc.)
- Grundlage
- Funktion der Encoder prüfen
- Fehler suchen
- Kalibrieren
- Testlauf des ActivityBot
- Entfernungen zurücklegen
- Gerade Strecken, Drehungen und Encoder Ticks
- Geschwindigkeit einstellen
- Echotest
- Aufbau und Test einer PING))) Sensorschaltung
- Der PING))) Test
- Den Raum erfassen mit Ultraschall
- Die Empfindlichkeit überprüfen, Stopp und Drehmanöver
- Objektverfolgung
- Programm zur Objektverfolgung
- Bemerkungen zu Regelkreisen
- Verfolgerreaktion besser verstehen
- Aufbau einer Fototransistorschaltung
- Fototransistorschaltung testen
- Graphisches Testprogramm
- QTI Sensor und Linienfolger
- Daten des Sensors, Aufbau, Einsatzmöglichkeiten
- Vorversuch zum QTI
- Versuchsschaltung für das BoE mit BASIC Stamp 2
- Versuchsschaltung für das Prop-BoE und Prop-AB
- Versuchsschaltung für den Arduino UNO
- Berechnung von Drehwinkeln
- Drehung um ein bestimmtes Winkelmaß
- Polygonaler Pfad
- Roboter auf polygonalen Pfaden
- Reguläre Polygone mit dem ActivityBot abfahren