
Assembler Kurs - Teil 0
1 - Erste Schritte mit AVRStudio 4.19
Nach dem Herunterladen und der Installation des Programms öffnet sich der Startbildschirm von AVR Studio mit verschiedenen Auswahlmöglichkeiten.
- Anlegen eines neuen Projektes (New Project) oder
- Öffnen eines bestehenden Projektes (Open) oder
- Abbruch (Cancel) und Übergang zum leeren Eröffnungsbildschirm.
Wähle in diesem Fall
- Anlegen eines neuen Projektes (New Project)
 Abbildung 1 - Startbildschirm von AVR Studio 4
Abbildung 1 - Startbildschirm von AVR Studio 4
In dem sich öffnenden Welcome-Bildschirm werden folgende Eintragungen vorgenommen
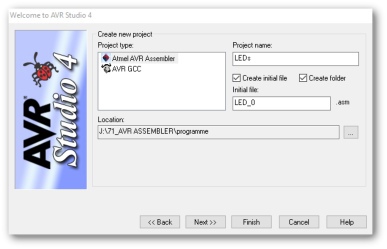 Abbildung 2 - Festlegung von Projektname und Arbeitsdateiname und Arbeitsverzeichnis
Abbildung 2 - Festlegung von Projektname und Arbeitsdateiname und Arbeitsverzeichnis
Project Type : Atmel AVR Assembler
Project Name: LEDs
Initial file : LED_0.asm
Location : Arbeitsverzeichnis auf dem eigenen Rechner
Abgeschlossen werden die Eintragungen mit einem Klick auf den Button Next >>. Im folgenden Bildschirm wird die Plattform für den Debugger und der in der Schaltung benutzte Controller ausgewählt.
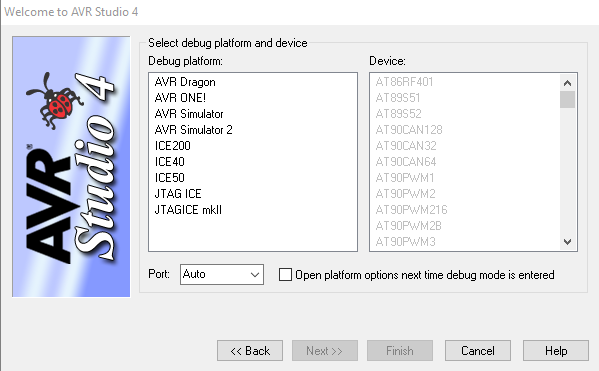 Abbildung 3 - Einstellung des Simulators und Auswahl des eingesetzten Controllers.
Abbildung 3 - Einstellung des Simulators und Auswahl des eingesetzten Controllers.
Folgende Einstellungen werden vorgenommen:
- Debug platform: AVR Simulator 2
- Device : ATtiny13A
Die Eingaben werden mit Finish beendet und AVRStudio meldet sich mit einer neuen Arbeitsoberfläche zurück.
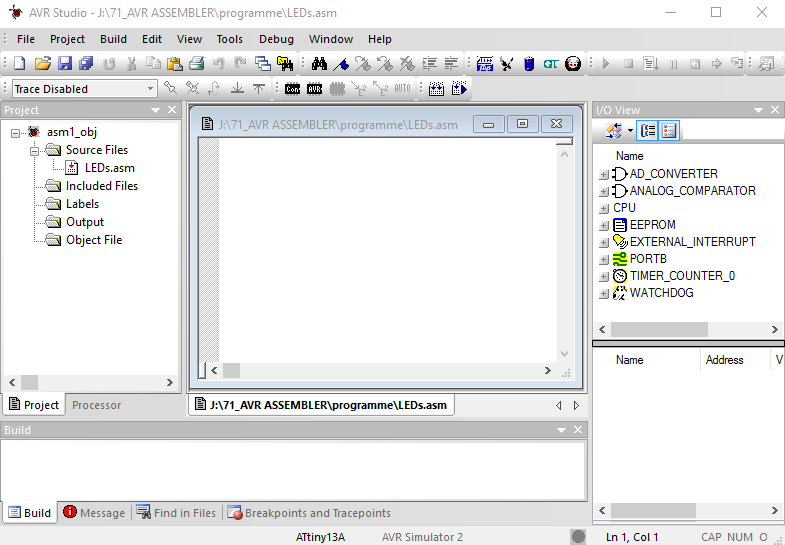 Abbildung 4 - Hauptbildschirm unter AVR Studio 4.x
Abbildung 4 - Hauptbildschirm unter AVR Studio 4.x
a - Project-Fenster, I/O View, Editor-Fenster
Ganz links befindet sich das Projekt-Fenster, in dem alle Dateien für das aktuelle Projekt LEDs gelistet sind. In der Mitte ist das Editor-Fenster, in das der Quellcode eingegeben wird und rechts oben das I/O Ansicht - Fenster.
b - Die Cursorposition
Die unterste Zeile des Bildschirmfensters von AVR Studio 4 zeigt rechts die Position des Cursors an:
Ln <zahl1>, Col <zahl2>.
Bei den zukünftigen Programmbesprechungen wird auf diese Angabe bezug genommen.
c - Registerinhalte anzeigen
Klickt man im Fenster I/O View vor dem Eintrag PORTB auf das Plus-Zeichen, öffnet sich ein Unterfenster mit den drei Registern: Data Register, Port B, Data Direction Register, Port B und Input Pins, Port B.
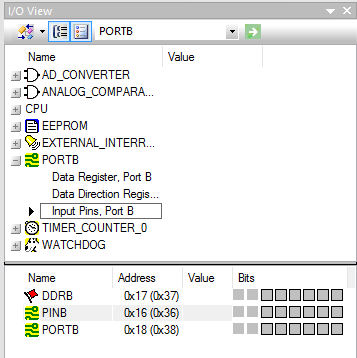 Abbildung 5 - I/O Ansicht Fenster mit Registerinhalten
Abbildung 5 - I/O Ansicht Fenster mit Registerinhalten
Im darunter befindlichen Fenster werden die drei Register mit ihrem jeweiligen Namen, der Adresse und den Bitzuständen angezeigt.
Einen ersten Zugang zum AVRStudio verschaffen wir uns im folgenden Abschnitt mit einem sehr kurzen Assemblerprogramm.
2 - Assembler Testprogramm
Aufgabe
- Übertrage das Programm LEDs.asm in den Editor von AVR Studio.
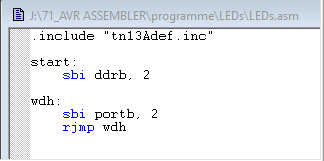 Abbildung 6 - Assemblerprogramm LEDs.asm im Editor von AVR Studio eingegeben.
Abbildung 6 - Assemblerprogramm LEDs.asm im Editor von AVR Studio eingegeben.
- Compiliere anschließend das Programm mit Build - Build.
- Starte den Debugger mit Debug - Start Debugging. Ein gelber Pfeil sollte jetzt auf das erste Kommando im Editorfenster zeigen: sbi ddrb, 2.
- Öffne im Fenster I/O Ansicht die Register zum PortB.
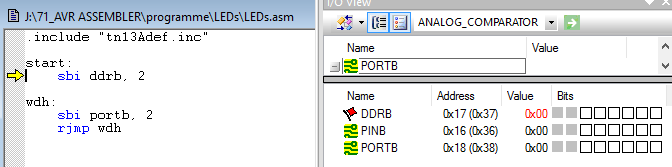
- Bewege mit F11 den gelben Pfeil eine Instruktion weiter und beobachte, ob DDRB.2 gesetzt wird.
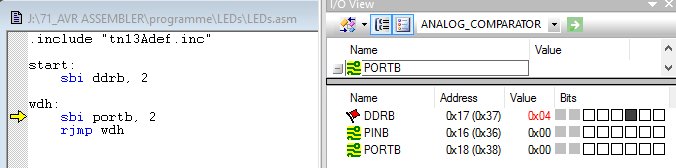
- Bewege mit F11 den gelben Pfeil eine Instruktion weiter und beobachte, ob PORTB.2 gesetzt wird.

- Pin B.2 ist bisher LOW oder 0 und wird jetzt auf HIGH oder 1 gesetzt.

Die Schleife zwischen wdh: und rjmp wdh wird jetzt beliebig oft durchlaufen; eine an PB.2 angeschlossene LED mit Vorwiderstand leuchtet.
3 - Das Programm in den ATtiny13A brennen
Rufe dazu im AVR Studio 4 über das Hauptmenü Tools / Program AVR / Auto Connect auf.
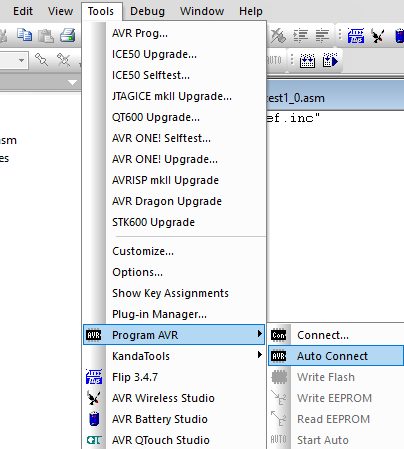 Abb. 7 - Verbinde das STK200 mit dem Computer
Abb. 7 - Verbinde das STK200 mit dem Computer
Bei erfolgreicher Verbindung mit dem Programmer öffnet sich ein weiteres Fenster:
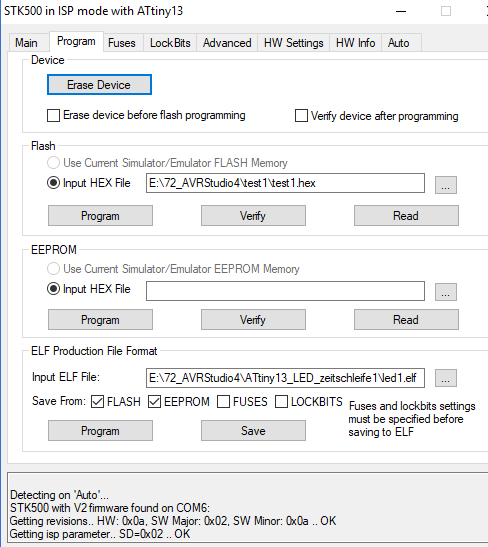
Abb. 8
Bei erfolgreicher Verbindung von AVR Studio 4 mit dem Programmer wird ganz unten im Fenster der COM-Port genannt, unter dem das Programm die Hardware verwaltet.
Wähle im Teilfenster Flash das Verzeichnis, in dem dein abgespeichertes Assemblerprogramm liegt und klicke anschließend auf den Button "Program"
Das erste kleine Programm wurde soeben in den Speicher des ATtiny13A gebrannt.
3A - Was man wissen sollte - Nibble, Byte, Word und andere
Einzelne Bits fasst man gerne in Gruppen zusammen und gibt ihnen Namen. Übliche Gruppennamen sind:
|
Nibble |
4 Bit |
| Byte | 8 Bit |
| Word | 16 Bit |
| Double Word | 32 Bit |
| Quadword | 64 Bit |
Die Bedeutung der Begriffe
- Word,
- Double Word und
- Quadword
ist nicht eindeutig und muss immer im Zusammenhang mit dem benutzten Prozessor gesehen werden. Bei einem 64-Bit Prozessor ist es durchaus üblich, dass ein Word aus 64-Bit besteht.
Die Bezeichnung aus der obigen Tabelle geht auf die 80-er Jahre zurück, als es nur 8- und 16-Bit Prozessoren für den Massenmarkt gab.
4 - BASCOM und Assembler
Der Einstieg in Assembler wird durch BASCOM sehr erleichtert. Wer nicht beim einfachen Abtippen von Programmen stehen bleiben und etwas tiefer in die Abläufe der Controller einsteigen möchte, sollte sich die Zeit nehmen, die hier vorgestellten Übungen intensiv durcharbeiten und dann auf die integrierte Entwicklungsumgebung AVR Studio 4.19 umschwenken.
Im vorherigen Abschnitt 4 wurde gezeigt, wie man sich mit Hilfe eines Debuggers die Ablauffolge in einem Assemblerprogramm mit gleichzeitiger Betrachtung verschiedener Register anzeigen lassen kann. In diesem Abschnitt wird erst einmal gezeigt, wie ein Assemblerprogramm in BASCOM aussehen muss. Dazu greifen wir das kurze Programm aus Abschnitt 2 auf und schauen uns seinen Verlauf in BASCOM an, brennen das Programm in einen ATtiny13A und überprüfen an der Hardware die vorhergesagte Verhaltensweise des Programms.
| Einfaches Assemblerprogramm mit LED | |
| Material |
|
Aufbau der Anwenderschaltung
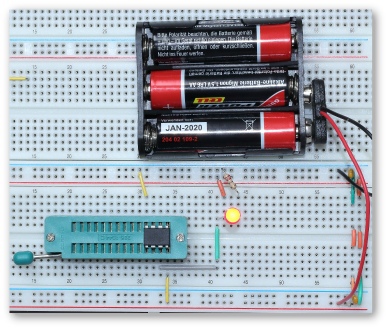 Abbildung 9 - Schaltungsaufbau für eine blinkende LED.
Abbildung 9 - Schaltungsaufbau für eine blinkende LED.
| Einfaches Assemblerprogramm mit LED | |
| Aufgaben |
|
Das Programm led_0.bas
 Abbildung 10 - Programm led_0.bas
Abbildung 10 - Programm led_0.bas
Dieses Programm ist identisch zum Assembler-Programm aus Abschnitt 2 (Abb. 6).
- Kompiliere das Programm mit F7 oder über das Hauptmenü Programmieren - Compilieren.
- Wenn kein Fehler angezeigt wurde, brenne das Programm in den Controller mit Programmieren - Zum Chip senden - Programmieren.
- Entnimm den ATtiny13A aus dem Nullkraft-Sockel und setze ihn in die Anwenderschaltung ein. Lege anschließend eine Spannungsversorgung an und achte dabei auf richtige Polung. Die LED sollte jetzt leuchten.
In der Simulation in Abschnitt 2 wurde bereits gezeigt, dass dieses Programm Pinport B.2 auf HIGH oder 1 setzt und damit eine LED einschaltet.
Wie arbeitet das Programm led_0 ?
Ein Assembler-Programm unter BASCOM beginnt immer mit
- $asm
und endet mit
- $end asm
Zwischen diesen beiden Markern muss das Assembler-Programm eingegeben werden.
Das eigentliche Programm besteht aus nur 5 Programmzeilen (Zeilen 16 - 21).
Zeile 16
Sprungadresse Start:, die nie angesprungen wird. Im Prinzip kann diese Zeile weggelassen werden; ich setze sie aus reiner Gewohnheit;-)
Zeile 17
SBI oder Set Bit ist ein sogenanntes Mnemonic für einen Maschinenbefehl. Was diese Instruktion tut, steht im Datenblatt des ATtiny13A unter Kapitel 21: Instruction Set Summary (S. 160ff). Dort findet sich unter dem Abschnitt BIT AND BIT-TEST INSTRUCTIONS
SBI DDRB, Bit Setze Bit im Data Direction Register B auf 1
SBI DDRB, 2 setzt das 2. Bit im Data Direction Register auf 1.
Befehlsausführungszeit: zwei Clocks (Taktimpulse). Bei 9,6 MHz entspricht das 208,3 ns, bei einem ATtiny mit 1,2 MHz dauert die Ausführung dieses Befehls 1,67 µs oder 1667 ns. Statusregister-Flags sind nicht betroffen.
Zeile 19
Die Sprungadresse Wdh: markiert eine Endlosschleife mit den beiden folgenden Befehlszeilen.
Zeile 20
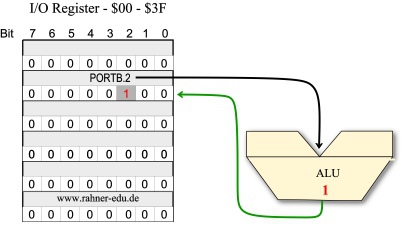
SBI PORTB, 2 Setzt Bit 2 im Register PORTB auf 1.
Zeile 21
RJMP (relativ jump) ist ein Rücksprungbefehl zur besagten Adresse wdh. Die genaue Syntax dieses Befehls findet sich ebenfalls im Datenblatt des Controllers:
RJMP k führt einen Sprung relativ zur momentanen Adresse aus.
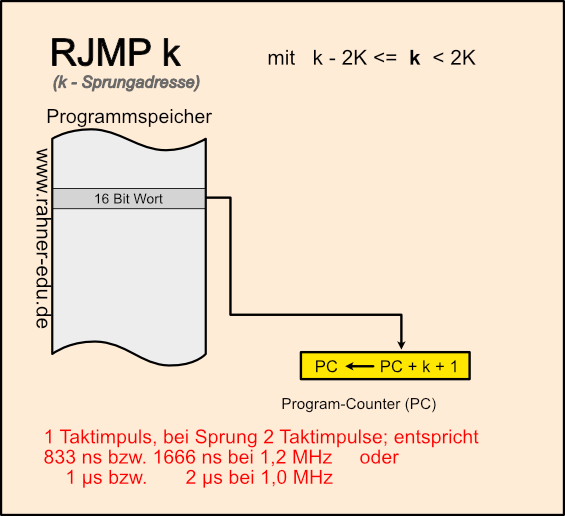
Es wird ein Sprung von k (Offset) relativ zur momentanen Adresse ausgeführt. Der Inhalt des Programmzählers ändert sich um den Wert k + 1, alternativ kann eine Sprungmarke angegeben werden.
Befehlsausführungszeit: zwei Clocks, das entspricht 208,3 ns bei 9,6 MHz oder 1667 ns bei 1,2 MHz. Statusregister-Flags sind nicht betroffen.
5 - Die I/O Ports des ATtiny13
Die Richtung eines Portpins kann von Eingang auf Ausgang geändert werden; die Ausgangstreiber sind stark genug, eine LED direkt anzusteuern und jedem Portpin kann individuell ein Pull-Up Widerstand zugeschaltet werden. Als Bezeichner tauchen in den Datenblättern die Buchstaben "x" für den Buchstaben des angesprochenen Ports und "n" für die Bitposition auf; wir werden sie genau so benutzen.
Beispiel
- PORTB3 bezeichnet Port B mit der Bitposition 3
- PORTxn bezeichnet Port x mit der Bitposition n
Jedem Port werden drei I/O Speicheradressen zugeordnet, jeweils eine für das
- Data Register - PORTx (read/write)
- Data Direction Register - DDRx (read/write)
- Port Input Pins Register - PINx (read only)
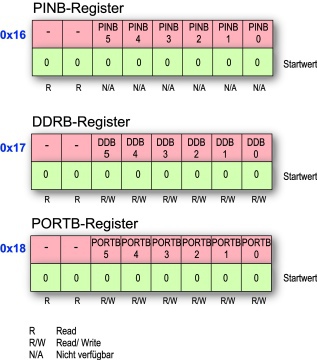
- Das Eingangsregister PINBn zeigt immer den aktuellen Zustand der Pins an. Er wird auch eingelesen, wenn der Pin als Ausgang beschaltet ist.
- Das Richtungsregister DDRBn legt die Eigenschaften der Ausgangstreiber fest. Bei DDBx = 1 (aktiver Ausgangstreiber) wird der Pegel des entsprechenden Registerbits PORTx auf den Ausgang gelegt.
- Das Ausgangsregister PORTBn wird bei aktivem Ausgangstreiber entsprechend dem anliegenden Bit gesteuert. Bei inaktivem Ausgangstreiber (0) wird mit einer 1 im Ausgangsregister der Pull-Up aktiviert.
Der Zugriff auf die Register wird durch die folgende Tabelle näher erklärt.
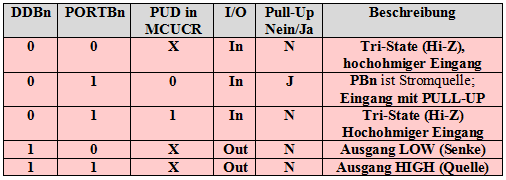
- Pin n als Eingang oder Ausgang deklarieren
Eingang DDBn = 0
Ausgang DDBn = 1
Bit n = 0 weist immer auf einen Eingang, Bit n = 1 immer auf einen Ausgang hin.
---------------------------------------------------------------------------------------------
- Pull-Up Widerstand am Pin n einschalten
Widerstand einschalten DDBn = 0 UND PORTBn = 1
Widerstand ausschalten DDBn = 0 UND PORTBn = 0
oder PBn wird als Output deklariert.
----------------------------------------------------------------------------------------------
- PBn auf HIGH oder LOW legen
PBn auf HIGH setzen DDBn = 1 UND PORTBn = 1
PBn auf LOW setzen DDBn = 1 UND PORTBn = 0
----------------------------------------------------------------------------------------------
Setzt man in einem PINBn-Register eine 1, führt das zu einem Umschalten des Zustandes im korrespondierenden Bit des Ausgangsregisters PORTBn, völlig unabhängig vom Wert im Register DDRBn.
Mit Hilfe des kleinen Programms led_1.bas lässt sich das schnell nachweisen. Es ist gegenüber dem Programm led_0.bas in Zeile 20 abgeändert worden. Compiliere zunächst das Programm mit F7, schalte den Simulator ein und gehe anschließend Instruktion für Instruktion durch das Programm.
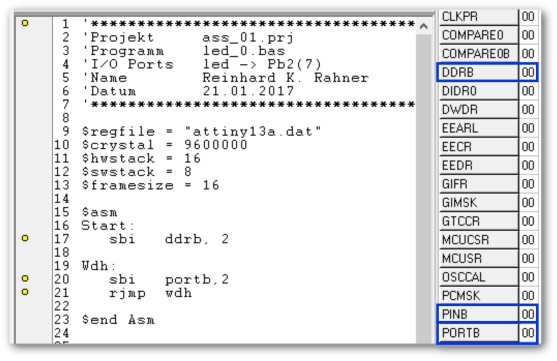 Abbildung 11 - Betrachtung einzelner I/O Register im Simulator. Alle Registerinhalte sind zum Start des Programms 0.
Abbildung 11 - Betrachtung einzelner I/O Register im Simulator. Alle Registerinhalte sind zum Start des Programms 0.
Das Augenmerk ist auf die drei Register DDRB, PINB und PORTB gerichtet, in denen mit dem Start der Simulation die Werte 00 stehen. Mit Ausführung der Instruktion SBI DDRB, 2 in Programmzeile 17 wird in DDRB der Wert 4 geschrieben.
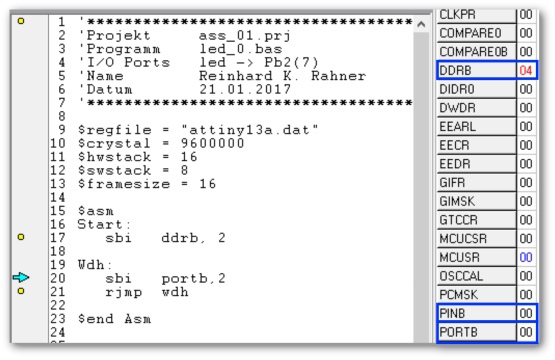 Abbildung 12 - Bit 2 im DDRB-Register ist gesetzt.
Abbildung 12 - Bit 2 im DDRB-Register ist gesetzt.
Im folgenden Schritt wird mit SBI PORTB, 2 in PB.2 eine 1 geschrieben.
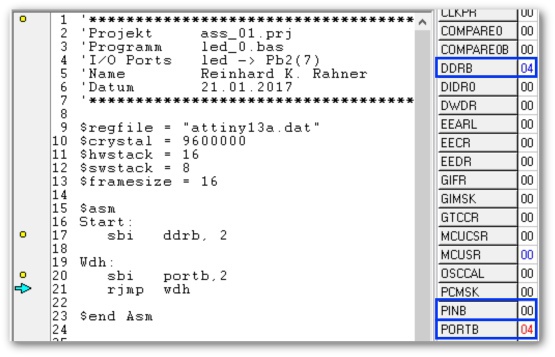 Abbildung 13 - Bit 2 im PORTB-Register ist gesetzt.
Abbildung 13 - Bit 2 im PORTB-Register ist gesetzt.
Wiederholt man das Ganze noch einmal, tauscht aber in Programmzeile 17 vorher SBI durch CBI (clear bit) aus, verhält sich das Programm genau wie vorher. Die Einstellung von DDRB hat keinen Einfluss auf das Verhalten von PORTB.2 oder allgemein von PORTB.n.
Warum steht eine 04 bei PORTB und DDRB statt einer 01?
SBI DDRB, 2 bedeutet, im Register DDRB wird an der Bitposition 2 eine 1 geschrieben.

Wird in das PortB.2 Bit eine 1 geschrieben, dann befindet sich dieses Bit an der 3. Stelle einer 8-Bit Zahl. Die binäre Zahl 0b00000100 entspricht der Zahl 4 im 10-er System und ebenso der Zahl 4 im 16-er System. Es ist dieser Wert 4, der vom Simulator als Registerinhalt angezeigt wird.
Umschalten zwischen INPUT und OUTPUT
Das Umschalten von INPUT zu OUTPUT ist nicht immer unproblematisch. Der Hersteller ATMEL gibt dazu in seinen Datenblättern entsprechende Hinweise, wo Probleme auftauchen können und wie man sie tunlichst umgeht.
- Hi-Z nach Output HIGH
Wird von einem Hi-Z Zustand (DDBn = PORTBn = 0 ODER DDBn = 0 UND PORTBn = 1) zu einem Output HIGH (DDBn = PORTBn = 1) gewechselt, sollte das immer über einen Zwischenzustand von entweder DDBn = 0 UND PORTBn = 1 (Pull-Up Widerstand EIN) ODER DDBn = 1 UND PORTBn = 0 (Output LOW) geschehen.
- Input mit Pull-Up nach Output LOW
Das gleiche Problem tritt bei einem Übergang von einem Input mit Pull-Up zu einem Output LOW auf. In diesem Fall sollte man als Zwischenschritt entweder DDBn = PORTBn = 0 (Hi-Z) oder DDBn = PORTBn = 1 (Output HIGH) wählen.
Was steht eigentlich in der Datei attiny13a.dat?
Zu Beginn des kleinen Programms led_0.bas wird mit $regfile = "attiny13a.dat" eine Datei aufgerufen. Den Inhalt dieser Datei schauen wir uns etwas genauer an, dazu muss sie mit einem beliebigen Editor geöffnet werden.
Irgendwo im ersten Drittel der Datei finden sich zum Beispiel die folgenden Einträge
 Abbildung 14 - Auszug aus der Datei ATtiny13A.DAT.
Abbildung 14 - Auszug aus der Datei ATtiny13A.DAT.
aus denen man erahnen kann, welche Arbeit sie uns bei der Erstellung eines Assemblerprogramms bereits abgenommen hat. Diese *.DAT Datei enthält alle notwendigen Voreinstellungen und Namenszuweisungen, die ein Assemblerprogramm später lesbar machen. Mit
- PORTB = $18
wird die Zuweisung der I/O Adresse $18 zum Wort PORTB vorgenommen. Mit gleichem Verfahren werden die anderen I/O Adressen, DDRB und PINB den entsprechenden Portregisternamen zugewiesen. Statt nach den Adressen für einen bestimmten I/O Port zu suchen, muss nur sein Name, den man sich leichter merken kann, eingegeben werden. Den Rest erledigt die entsprechende *.DAT Datei für uns, die es zu jedem von uns benutzten Controller gibt.
Wer sich für die Programmierung der AVR-Controller unter BASCOM interessiert, sollte jetzt hierhin wechseln.
In den nachfolgenden Kapiteln wird nur noch mit der AVRStudio-IDE, dem STK200-Board und ggf. dem AVR-Simulator gearbeitet.
F4F506