
Seeeduino Nano und Grove
1 - Der Grove IR Reflexionssensor

Abb. 1 – Grove Reflexionssensor (Rückansicht)
Im Unterschied zur Einweg-Lichtschranke, bei der sich Sender und Empfänger gegenüberstehen und sowohl in einem Gehäuse (Gabellichtschranke) oder in getrennten Gehäusen untergebracht sein können, befinden sich bei einem Reflexionssensor Sender und Empfänger parallel zueinander in einem Gehäuse.
Ein Lichtsignal wird emittiert, von einem Reflektor zurückgeworfen und vom Empfänger detektiert. Diese Sensoren werden eingesetzt:
- zur Bestimmung von Umdrehungsgeschwindigkeiten.
- zur Zählung von Objekten.
- zur Mustererkennung.
- zur Objekterkennung: z. B. als Linienfolger in der Robotik, zur Objekterkennung auf einem Fließband etc.
2 - Arbeitsweise des Sensors
Der vorliegende Sensor vom Typ RPR 200 besteht aus einem IR LED und Fototransistor Paar. Das von der IR LED ausgesandte Licht wird von einem vor ihr liegenden Objekt reflektiert und vom Fototransistor erkannt. Dahinter steckt die tiefe Erkenntnis, dass hellere Oberflächen das Licht stärker reflektieren als dunklere.
Ist die Intensität des reflektierten Lichtes stark genug, wird am Pin SIG ein LOW-Signal ausgegeben und die auf der Platine befindliche LED leuchtet; ist das nicht der Fall, steht an SIG ein HIGH-Signal und die LED ist aus.
Der empfindliche Bereich des Sensors liegt zwischen 4 und 16 mm Abstand zum detektierten Objekt. Mit Hilfe eines Potenziometers lässt sich die Verstärkung des auf der Platine befindlichen Operationsverstärkers und damit auch die Empfindlichkeit des Sensors verändern und den Gegebenheiten anpassen.

Abb. 2 – Grove Reflexionssensor (Oberseite mit Potenziometer und Indikator LED)
3 - Bemerkungen zur Physik des Sensors
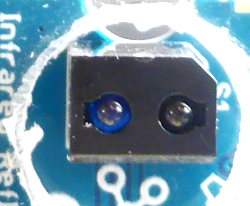
Abb. 2a
Der Sensor RPR220 enthält eine IR LED und einen Fototransistor. In der Abbildung befindet sich der Fototransistor auf der rechten Seite, links ist die IR LED.
Dazu ist ein Blick in das Datenblatt des Sensors RPR220 notwendig. Als Maximalwerte entnimmt man:
IR LED
- Durchlassstrom (forward current): 50 mA
- Sperrspannung (reverse voltage): 5V
- Verlustleistung (power dissipation): 80 mW
Fototransistor
- Kollektorstrom: 30 mA
- Kollektor-Verlustleistung: 80 mW
- Bei dunklen Reflexionsflächen liegt der Kollektorstrom bei maximal 0,5 µA, während er bei hellen Flächen zwischen 0,08 mA und max. 0,8 mA liegt.
<< wird fortgesetzt >>
4 - Den Sensor kalibrieren
- Verbinde den Sensor mit einer Digitalbuchse auf dem Grove Shield.
- Verbinde den Seeeduino Nano über das USB-Kabel mit einem Computer/Laptop.
- Halte den Sensor ca. 12 mm über einem weißen Blatt Papier.
- Verstelle den Mittelabgriff des Potenziometers so lange, bis die LED zu leuchten anfängt.
- Wird der Sensor auf gleicher Höhe jetzt über eine dunklere Fläche bewegt, sollte die LED aus gehen. Sollte das nicht der Fall sein, verstelle den Mittelabgriff vorsichtig, bis die LED erlischt.
Damit ist der Sensor kalibriert und kann für die erste Übung benutzt werden.
Herhalten muss ein ausrangiertes Festplattenlaufwerk, dessen blankpolierte oberste Festplatte mit schmalen schwarzen Streifen beklebt wurde. Dadurch, dass sich die Platten von Hand leicht drehen lassen, sind erste Messungen hier gut durchzuführen.

Abb.3 – Ausrangierte Festplatte mit Reflexionsstreifen beklebt. Geschwindigkeitsaufnahme über manuell ausgeführte Drehbewegungen.
Übung: Drehzahlmessung – Teil 1 (MO)
Didaktisch methodische Einordnung
Die Schülerinnen und Schüler lernen in diesen Übungen ...
- ... eine Schaltung nach Vorgabe aufzubauen und so zu modifizieren, dass ein stabiler Messaufbau vorliegt.
- ... einen IR Reflexionssensor, seine Wirkungsweise und Beschaltung kennen.
- ... einem Datenblatt schaltungsspezifische Informationen zu entnehmen.
- ... sich darüber Gedanken zu machen, was sie gemessen haben und mögliche Fehlerquellen aufdecken.
- ... den Interrupt-Befehl der Sprache Arduino-C kennen.
- ... einfache Änderungen im Programm vorzunehmen und neuen Anforderungen anzupassen.
- ... Versuchsergebnisse zu bewerten und Fehlerquellen zu benennen.
| Übung: Drehzahlmessung - Teil 1 (MO) | |
|
Material |
|
|
Aufgaben |
|
Schaltungsaufbau
Für diese Übung reicht es, wenn man den Reflexionssensor provisorisch über der Festplatte mit einem Tesastreifen an einem Gestänge oder einem Stück Holz befestigt. So hat man beide Hände für das Experiment frei. Hier ist etwas handwerkliches Geschick gefragt.
Das Programm „Drehzahlmessung.ino“

Mögliche Messergebnisse
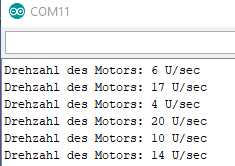
Abb. 4 – Manuell gedrehter Festplatten-Teller mit Markierungsstreifen. Was wurde hier wirklich gemessen?
Bemerkungen zum Programm
Das Programm zur Drehzahlmessung arbeitet mit einem Interrupt über das dann eine sogenannte Interrupt-Service-Routine (ISR) aufgerufen wird. Einige Bemerkungen dazu findest du hier -> Kapitel 6 – Bemerkungen zur Funktion attachInterrupt(); das solltest du dir unbedingt durchlesen.
Weiteres Hintergrundwissen bekommst du auch unter dem Thema QTI.
Übung: Drehzahlmessung – Teil 2 (MO)
| Übung: Drehzahlmessung - Teil 2 (MO) | |
|
Material |
|
|
Aufgaben |
|
Schaltungsaufbau

Abb. 5 – Der IR-Reflexionssensor wurde für diese Übung auf eine Acrylplatte (5cm x 5cm mit Bohrung 10mm) geschraubt. Der Reflexionssensor befindet sich in der Bohröffnung. Die Acrylplatte liegt auf dem Lüfter, der wiederum auf einer flachen LED Leuchtplatte liegt. Der Lüfterflügel besteht aus sieben Rotorblättern.

Abb. 6
Das Lüfterrad
Das Programm „Drehzahlmessung.ino“
Identisch mit dem Programm aus Übung 1
Messung
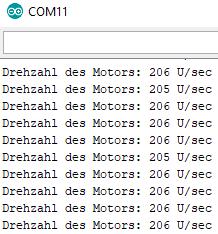
Abb. 6
Die von dem Programm ausgegebenen Drehzahlen für den Lüftermotor. Was ist hier tatsächlich gemessen worden?
Würdigung des Messergebnisses
- Schaue dir die gemessenen Drehzahlen und das Lüfterrad noch einmal an (Abb. 5). Welche Umdrehungszahl pro Sekunde hat das Lüfterrad tatsächlich gemacht und warum ist die angegebene Drehzahl im Terminalfenster falsch?
- Ändere das Programm „Drehzahlmessung.ino“ so ab, dass bei einer weiteren Messung die korrekte Umdrehungszahl für den Lüfter angegeben wird.
Weiter geht es mit dem Grove OLED Display 0.96"