
1 - Das Kompassmodul HM55B von Hitachi
Für dieses Kapitel werden Kenntnisse über trigonometrische Funktionen sowie Winkel- und Bogenmaß vorausgesetzt.
Mit diesem Modul lassen sich Richtungen bestimmen. Zusammen mit einem LC-Display und einem Board of Education entsteht ein digitaler Kompass, der sich, wie in Abb. 1 dargestellt, einsetzen lässt.
In selbststeuernden oder führerlosen Fahrzeugen, wie sie inzwischen öffentlich diskutiert werden, können solche Bausteine zukünftig eine große Rolle spielen.
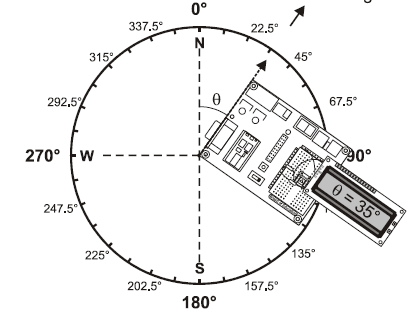 Abbildung 1 Hitachi Kompassmodul mit LC-Display auf einem Board of Education (BoE) - Courtesy of Parallax Inc.
Abbildung 1 Hitachi Kompassmodul mit LC-Display auf einem Board of Education (BoE) - Courtesy of Parallax Inc.
Wir werden zunächst das Modul beschalten, antesten und kalibrieren und zeigen, wie mit Hilfe der Mittelwertbildung das Hintergrundrauschen aus Messungen herausgefiltert werden kann.
Welche Informationen geben die Kompass-Messwerte?
In der Produktinformation zum Hitachi HM55B Kompassmodul werden Programmbeispiele genannt, die alle mit einem Unterprogramm Compass_Get_Axes arbeiten, das die magnetische Feldstärke in x und y Richtung als Rückgabewert enthält. Der x-Wert entspricht dabei der Erdmagnetfeld-Komponente, die auf die xm-Achse des Sensors wirkt (Abb. 2). Der y-Wert entspricht dem negativen Wert des Erdmagnetfeldes, das auf die ym-Achse wirkt.
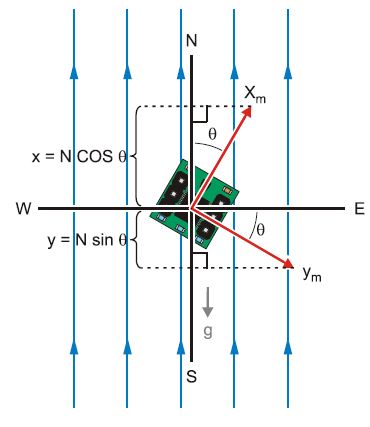 Abbildung 2 Kompass Modul und Achslage - Courtesy of Parallax Inc.
Abbildung 2 Kompass Modul und Achslage - Courtesy of Parallax Inc.
Wenn N der Stärke des Erdmagnetfeldes in N-S Richtung entspricht, dann errechnet sich die magnetische Feldstärke in x-Richtung bei einem Winkel Theta zur N-S Richtung zu

und entsprechend in y-Richtung

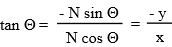
Mit diesem Wissen und entsprechenden Kenntnissen aus der Trigonometrie ergibt sich dann
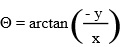
Aufgelöst nach dem Winkel Theta ergibt sich
2 - Beschaltung des Kompass-Moduls und ein erster Test
In dieser Übung wird der Kompass-Modul auf dem Steckbrett des BoE verdrahtet und mit einem ersten Programm überprüft, ob das Modul betriebsbereit ist.
| Material |
1x Board of Education 1x USB-Verbindungskabel 1x Kompass-Modul Hitachi HM55B 6x Steckdraht |
| Aufgaben |
|
Schaltskizze und Schaltungsaufbau
Die beiden Pin Dout und Din werden gemeinsam an den I/O Pin P2 der BASIC Stamp geführt. Über diesen Pin werden Daten zwischen dem Controller und dem Modul ausgetauscht. Ein weiterer I/O Pin, P0 der BASIC Stamp, ist mit dem CLK Pin des Moduls verbunden. Über diesen Pin werden Impulse vom Controller an das Modul geschickt. Vor einem Datenaustausch wird über P1 der Pin /Enable des Kompass Moduls auf 0 gesetzt und jede Magnetfeldmessung initialisiert.
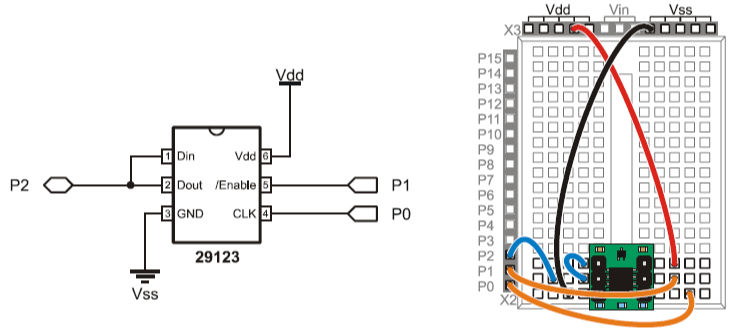 Abbildung 3 Schaltskizze und Schaltungsaufbau - Courtesy of Parallax Inc.
Abbildung 3 Schaltskizze und Schaltungsaufbau - Courtesy of Parallax Inc.
Das Programm HM55B_1.bs2
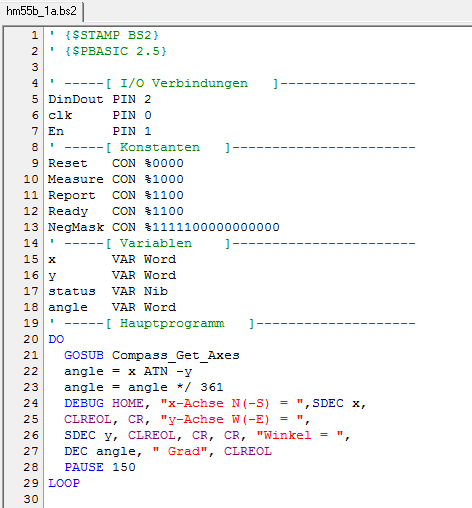
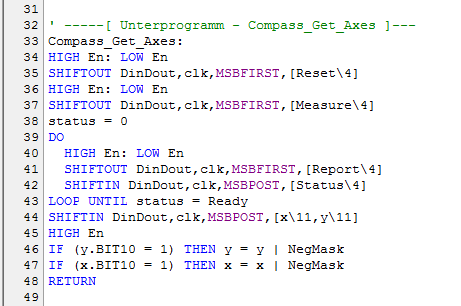 Programm HM55B_1.bs2
Programm HM55B_1.bs2
Kompass Modul testen
Das Programmbeispiel überprüft, ob das Modul richtig verbunden ist und ob alle Funktionen des Bausteins angesprochen werden können. Es können deutliche Unterschiede zwischen dem magnetischen Norden, der von einem mechanischen Kompass angezeigt wird, und dem vom Kompass Modul angezeigten auftreten. Erst mit den noch ausstehenden Kalibrierungseinstellungen werden eventuelle Messunterschiede langsam verschwinden.
In Abbildung 5 wird dargestellt, was im Terminal angezeigt wird, wenn das Modul 26° rechtsweisend von der Nordrichtung abweicht. Exakte Messwerte sind jetzt noch nicht zu erwarten, wie ich eben bereits erwähnte; es geht jetzt erst einmal um das reine Austesten der Funktionsfähigkeit des Moduls. Die Richtungen Nord, Süd, Ost und West sollten sich aber bereits feststellen lassen.
Bemerkungen zur Winkelberechnung in PBASIC
Der Operator ATN (arcus tangens) gibt den Winkel eines Vektors zurück, der durch seine x- und y-Koordinaten festgelegt ist. Die Syntax von ATN lautet:
-
xKoordinate ATN yKoordinate
wobei xKoordinate und yKoordinate die Koordinaten des Zielpunktes eines Vektors sind.
Als Rückgabewert wird ein Winkel im sogenannten binären Bogenmaß (0 ... 255) statt in Grad zwischen 0 und 359 ausgegeben. Das binäre Bogenmaß bezeichnen wir kurz als brad (binary radian).
In der Schule werden die sin- und cos-Funktionen am Einheitskreis dargestellt; ihre Werte liegen immer zwischen +1 und -1. Die sin- und cos-Funktionen in PBASIC werden am 127-Einheitenkreis (Radius: 127) dargestellt. Ihre Werte bewegen sich zwischen -127 und +127.
Brads werden über die folgende Formel ins Winkelmaß umgerechnet:
-
brad * 180 / 128
Die Umwandlung vom Grad- ins Bradmaß erfolgt über die Formel:
-
grad * 128 / 180
Abb. 4 zeigt den Zusammenhang zwischen Gradmaß und Brad am Beispiel der Winkelfunktionen f(x)= sinus(x) und g(x) = cos(x).
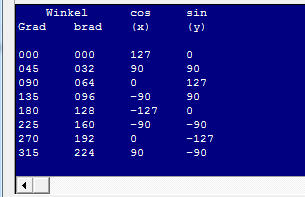 Abbildung 4 Berechnung der sin- und cos-Funktion für verschiedene Winkelmaße
Abbildung 4 Berechnung der sin- und cos-Funktion für verschiedene Winkelmaße
 Courtesy of Parallax Inc.
Courtesy of Parallax Inc.
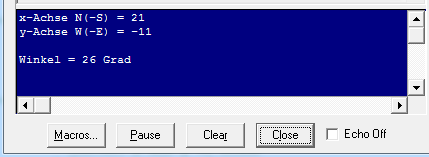 Abbildung 5 Ausgabe im Debug Terminal; das Modul wurde aus der Nordrichtung um 26° in Uhrzeigerrichtung gedreht.
Abbildung 5 Ausgabe im Debug Terminal; das Modul wurde aus der Nordrichtung um 26° in Uhrzeigerrichtung gedreht.
3 - Das Erdmagnetfeld
Es gibt auf der Erde nur ganz wenige Orte bei denen das Erdmagnetfeld parallel zur Erdoberfläche verläuft. Im Regelfall tritt es unter einem bestimmten Winkel gegen die Oberfläche in die Erde hinein oder aus ihr heraus. Diesen Winkel bezeichnen wir als Inklinationswinkel oder kurz Inklination.
| Aufgaben |
|
Unter Deklination verstehen wir die Abweichung in Grad zwischen dem magnetischen und dem geographischen Nordpol. Dabei wird der geographische Nordpol durch den virtuellen Schnittpunkt der Erdrotationsachse mit der Erdoberfläche definiert. Der magnetische Pol ist durch die Region auf der Erde definiert, an dem die Magnetfeldlinien senkrecht in bzw. aus die/der Erdoberfläche ein-/austreten.
Informationen über die Inklination und Deklination für bestimmte Orte in Deutschland bekommt man über das Deutsche Geoforschungszentrum in Potsdam.
Für Hamburg finden sich dort folgende Werte von Januar 2016:
| Deklination | 2° 15’ |
| Totalintensität | 49627,1 nT -> 49,6271 µT |
| Inklination | 68° 29’ |
| Horizontalintensität | 18189,6 nT -> 18,1896 µT |
| N-Komponente | 18189,6 nT -> 18,1896 µT |
| O-Komponente | 766,1 nT -> 0,7661 µT |
| Vertikalkomponente | 46167,1 nT -> 46,167 µT |
Kurze Beschreibung des Erdmagnetfeldes
Neben der Stärke des Erdmagnetfeldes sind weitere Beschreibungsgrößen notwendig. Zum Beispiel muss auch die Richtung des magnetische Feldvektors im Raum mit angegeben werden. Diese wird bestimmt durch zwei Winkel: die sog. Deklination und Inklination. Hinzu kommt die Angabe von drei rechtwinkligen Komponenten des Feldes in Richtung geographisch Nord (X), geographisch Ost (Y) und lotrecht dazu in die Erde (Z).
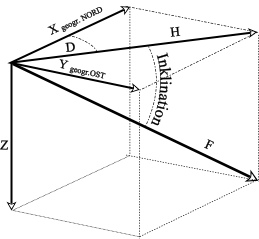
Die beiden Komponenten X und Y verlaufen parallel zur Erdoberfläche; die X-Komponente zeigt zum geographischen Nordpol. Richtung, Stärke und Orientierung des Erdmagnetfeldes wird durch den Vektor F wiedergegeben; H ist seine Horizontalkomponente, die parallel zur Erdoberfläche verläuft und nach dem magnetischen Nordpol weist.
Der Vertikalkomponente Z weist zum Erdmittelpunkt.
Der Inklinationswinkel I wird von H und F aufgespannt; es ist der Winkel, unter dem die Magnetfeldlinien auf die Erde treffen. Die Deklination D ist der Winkel zwischen magnetischer H und geographischer X Nordrichtung.