
1 - Pulsweitenmodulation und Infrarot (IR)
Was passiert eigentlich, wenn man mit einer Fernbedienung den Fernseher oder eine Audioanlage ein- bzw. ausschaltet und wieso gelingt es, die Lautstärke oder einen neuen Sender einzustellen, wenn man auf einen anderen Knopf der Fernbedienung drückt? Das werden wir hier ein wenig genauer untersuchen und das Oszilloskop wird uns auch hier wieder mal die Augen öffnen.
IR Detektoren sind auf spezielle Frequenzen geeicht. Die Detektoren, die wir hier und in der Robotik einsetzen, sind mit einem sogenannten Bandpassfilter auf 38,5 kHz abgestimmt. Der Detektor wird nur antworten, wenn er ein Signal mit dieser Frequenz erhält, sonst bleibt er stumm.
Die Datenübermittlung erfolgt mit einem modulierten 38,5 kHz Signal, das man dadurch erreicht, dass man die Impulslängen des Signals verändert. Es ähnelt stark der asynchronen Datenübertragung, die HIGH und LOW Signale zu bestimmten Zeiten überträgt. Der einzige Unterschied im IR Protokoll ist, dass ein IR-Signal nicht mit HIGH- sondern mit 38,5 kHz Signalen arbeitet. Einzelne Bits werden nicht durch Nullen und Einsen festgelegt, sondern durch unterschiedliche Pulslängen.
Der Ausgang des IR-Detektors ist active-low, was soviel heißt, dass, wenn er ein 38,5 kHz IR-Signal empfängt, auf LOW geht. Umgekehrt, empfängt er kein Signal, ist er auf HIGH (Ruhezustand). In der folgenden Abbildung ist ein möglicher Datenstrom einer SONY IR-Fernbedienung dargestellt. Der Empfänger ermittelt, wie lange das Signal auf LOW ist. Eine Zeitspanne von 0,6ms steht für eine logische 0, während 1,2ms für eine logische 1 steht.
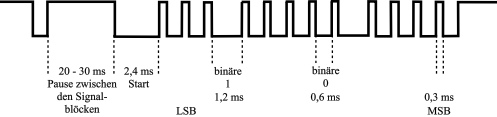 Abbildung 1 - Beispiel für eine IR Signal-Impulsfolge
Abbildung 1 - Beispiel für eine IR Signal-Impulsfolge
Mit IR lassen sich Objekte erfassen; dabei wird der ausgesandte IR Strahl vom Objekt reflektiert. Befindet sich das Objekt nah genug zur Lichtquelle, wird das Licht reflektiert, der IR Detektor fängt es auf und setzt seinen Ausgang auf LOW.
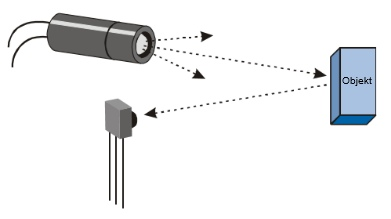 Abbildung 2 - IR Objekterkennung durch Reflexion der Strahlung am Objekt
Abbildung 2 - IR Objekterkennung durch Reflexion der Strahlung am Objekt
2 - Infrarotsignale zur Objekterkennung
In dieser Übung erzeugt die BASIC Stamp ein 38,5 kHz Signal, mit dem der Ausgang eines IR Detektors auf 0 gezogen wird.
| Material |
1x 220 Ohm Widerstand (rot-rot-braun) 1x IR Detektor 1x IR LED 8x Steckdraht |
Zusammenbau eines IR-Senders
Zum Aufbau werden drei Teile benötigt
-
IR LED -
ein langer einseitig geschlossener Plastikzylinder mit Durchführungsöffnungen für die LED Anschlüsse -
ein kurzer beidseitig offener Plastikzylinder
Die drei Teile werden - wie in der Abbildung dargestellt - zusammengesetzt.

3 - Aufbau einer IR Detektorschaltung
Beim Aufbau muss darauf geachtet werden, dass Sender und Empfänger in die gleiche Richtung weisen.
| Aufgaben |
|
Schaltskizze und Verdrahtungsplan
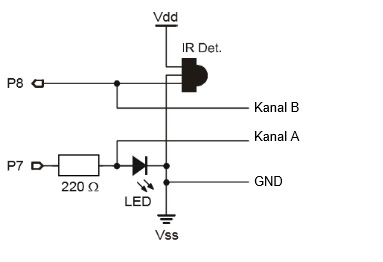 Abbildung 3 - Schaltung zur IR Objekterkennung
Abbildung 3 - Schaltung zur IR Objekterkennung
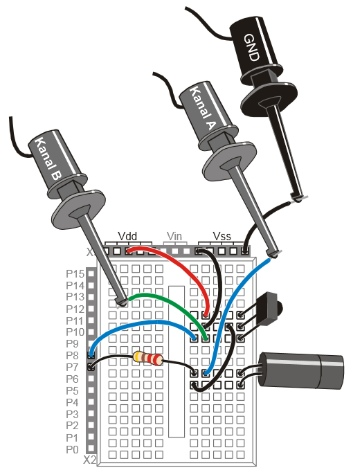 Abbildung 4 - Verdrahtungsplan zur Schaltskizze mit Darstellung der Tastköpfe eines Oszilloskops
Abbildung 4 - Verdrahtungsplan zur Schaltskizze mit Darstellung der Tastköpfe eines Oszilloskops
4 - Testprogramm zum IR-Detektor
| Testprogramm zum Infrarot-Detektro | |
| Aufgaben |
|
Das Programm IR38kHz.bs2
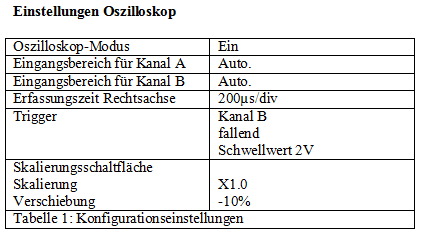
 Abbildung 5 - Objekterkennung mit IR-Detektor; sobald ein Objekt erkannt ist, geht der Ausgang von HIGH auf LOW.
Abbildung 5 - Objekterkennung mit IR-Detektor; sobald ein Objekt erkannt ist, geht der Ausgang von HIGH auf LOW.
Erläuterungen zum Oszillogramm
Kanal A (blau, Sender) zeigt eine Pulsfolge von ca. 1ms Länge, wie sie vom Befehl
-
FREQOUT 7, 1, 38500
erzeugt wurde. Kanal B (rot, Detektor) ist über einen Zeitraum von 1ms auf LOW, weil er das Objekt, das vor dem Detektor steht, erkannt hat. Das Signal ist zeitversetzt; der IR Detektor benötigt selbst etwas Zeit, um sich auf das reflektierte Signal einzustellen. Die Zeitverschiebung liegt bei ca. 200µs.
Wenn sich das Objekt vor dem Detektor bewegt und nur kurzzeitig erfasst wird, sollte sich der Kurvenverlauf rot verändern. Dies zeigt das folgende Bild, bei dem ich meine Hand vor dem Detektor schnell hin- und herbewegt habe.
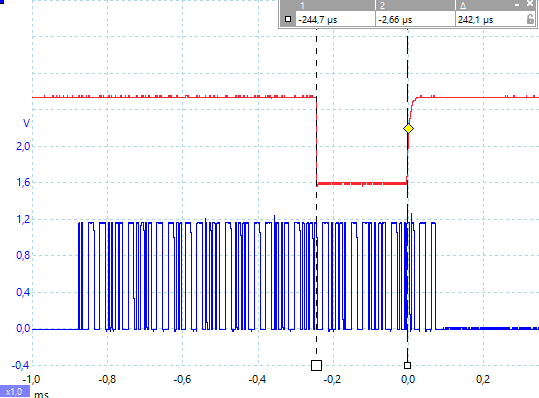 Abbildung 6 - Ein Objekt wird schnell an einem IR-Detektor vorbeibewegt. Die Erfassungszeit beträgt im Beispiel 242µs.
Abbildung 6 - Ein Objekt wird schnell an einem IR-Detektor vorbeibewegt. Die Erfassungszeit beträgt im Beispiel 242µs.